
Команда инженеров из Стенфорда разработала алгоритм, который помогает системе автономного вождения «видеть» объекты, находящиеся вне зоны видимости, пишет The Register.
Технологию «съёмки вне прямой видимости» (non-line-of-sight imaging, NLOS) исследователи описали в журнале Nature. Пока она работает очень медленно, но будущем, уверяют авторы, сможет повысить безопасность беспилотных авто.
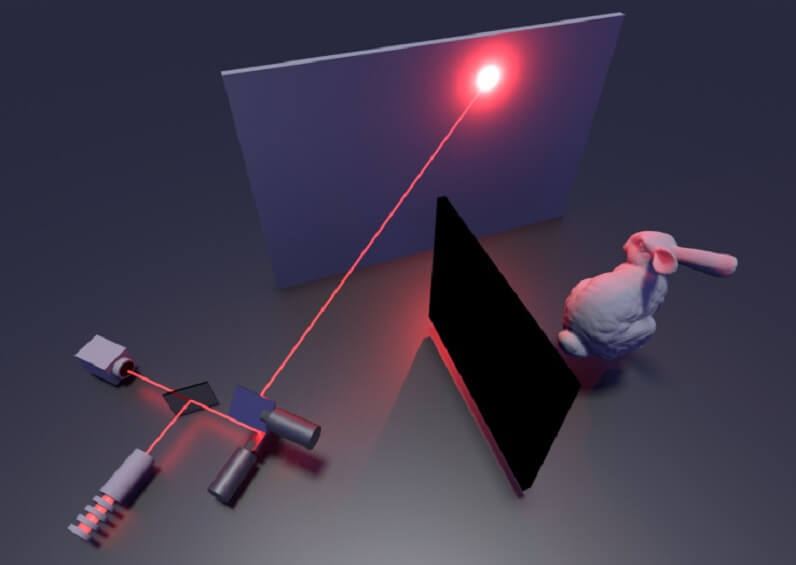
NLOS работает следующим образом: лазерный луч направляют на подходящую поверхность, от которой он отражается на невидимый объект, а от него — обратно на стену, где его ловит линза и специальный датчик. Пока сканирование занимает от двух минут до часа в зависимости от освещения или отражающей способности объекта. Измеряя время, за которое луч возвращается на датчик, и траекторию его движения, алгоритм восстанавливает находящийся вне поля зрения предмет.
«Такие сканирования мы проводим несколько раз. Собрав замеры времени отражения луча из разных точек, мы применяем вычислительную модель, которая обрабатывает данные и воссоздаёт объект. Ключевая особенность технологии в том, что эту модель можно интегрировать с обычными технологиями обработки изображений», — рассказал один из соавторов доклада Дэвид Линделл.
На данный момент в беспилотниках используют технологию сканирования LiDAR, также основанную на измерении времени, за которое отражённый световой импульс возвращается к источнику. Применять NLOS на практике пока неэффективно, потому что обработка огромного количества сканов требует значительных вычислительных мощностей и затрат времени. Исследователи планируют усовершенствовать алгоритм и уже начали тестировать его совместно с промышленными лидарами.




Релоцировались? Теперь вы можете комментировать без верификации аккаунта.